Back to Work
Robotics Research Intern
Memorial University
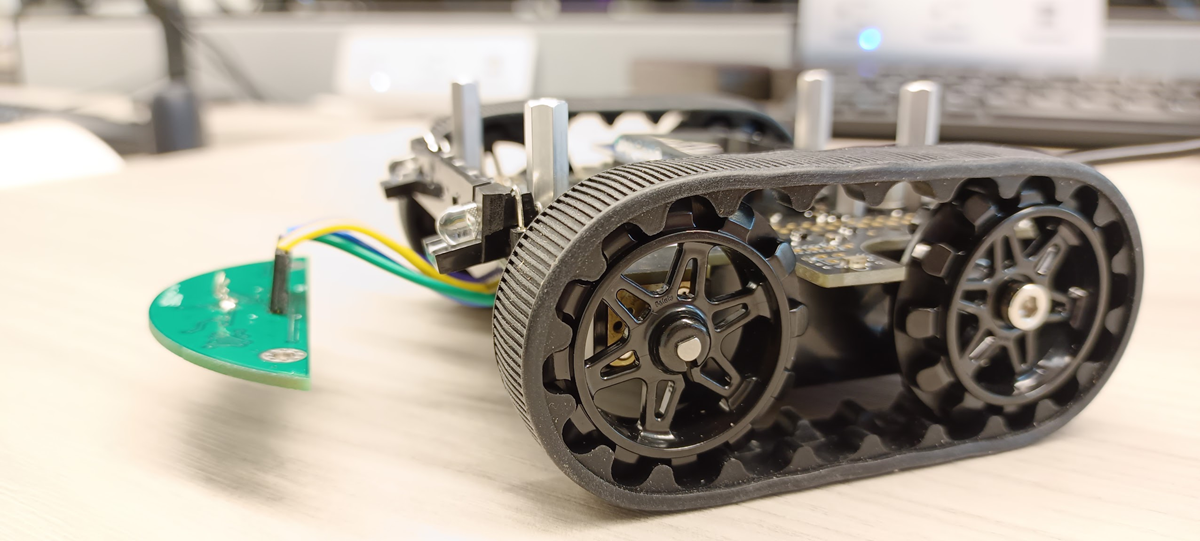
Swarm Robotics & Embedded Systems
I engineered embedded systems for the "ZumoBot" swarm robotics project. My work focused on low-level C++ programming to enable sensor fusion between DekaBot hardware and Adafruit color sensors, allowing the robots to make autonomous decisions based on their environment.
Technical Deep Dive
I2C Protocol
Developed a custom I2C communication protocol to synchronize data transfer between the main flight controller and peripheral sensors with minimal latency.
PID Control
Implemented PID (Proportional-Integral-Derivative) control loops to ensure smooth motor response and precise line-following capabilities.
Project Stats
C++
Core Language
I2C
Protocol
v1.0
Swarm Version
Tech Stack
C++Embedded SystemsI2CPID ControlRoboticsArduino
Key Achievements
- Integrated DekaBot & Adafruit Sensors
- Custom I2C Protocol
- PID Control Implementation
- Deployed Swarm v1 Behavior