Software Team Lead
Valiant Aerotech | Memorial University
Origins & Vision
Valiant Aerotech was founded in the Fall of 2024 by a group of passionate engineering students at Memorial University of Newfoundland. What began as a small classroom initiative has evolved into a multidisciplinary design team focused on innovation in aerial robotics.
Our mission is to apply academic theory to real-world chaos - designing systems that can survive 15+ knot winds, navigate GPS-denied urban canyons, and coordinate autonomously in critical infrastructure zones.
Project: National Student UAS Competition (2026)
Current Objective - Urban Firefighting RFP
Task 1: Reconnaissance
Scenario: Dense city block fire. Firefighters en route.
- 01.Precision Drop: Deliver radios, oxygen, and ladders to 1m² zones.
- 02.Urban Canyon: Target ID in high-rise simulation.
Task 2: Suppression
Scenario: Indoor/outdoor active fire suppression.
- 01.Faraday Cage: Ops inside metal shed (GPS denied).
- 02.pH Targets: Water triggers color change on target.
Status: Design & Prep


Operational Heritage (2025)
Past Objective - Rural Firefighting RFP
Task 1: Hotspot Detection
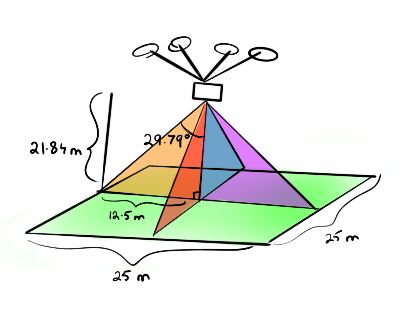
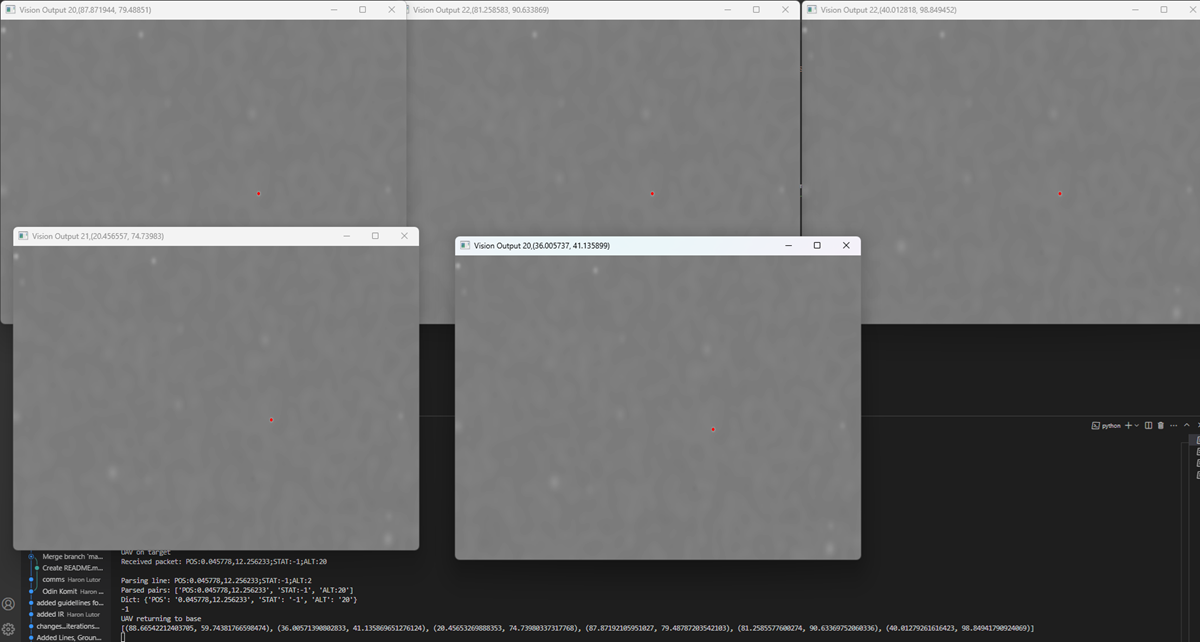
Mapped search area defined by vertical lines of IR emitters.
- ✓Detected 940nm IR Emitters (hotspots)
- ✓Identified "Source" (Crashed Drone prop)
- ✓Generated KML Map with < 3m accuracy
Task 2: Water Transport
Heavy-lift ops involving autonomous drafting and bucket distribution.
- ✓Zero-contact water loading (Aerial Drafting)
- ✓15kg Max Takeoff Weight Compliance
Archive: Medicine Hat 2025








The Fleet
Initializing 3D Viewer...
Vulcan
Task 1: Urban Recon
Designed for heavy lift and precision drop. Tasked with delivering critical equipment (Radio, Oxygen, Ladders) to staging areas and identifying targets in Urban Canyons.
Software Architecture
The Tri-Layer Autonomous Stack
Planning & Navigation
The "Brain" of the fleet. This layer handles high-level decision making, generating efficient flight paths through complex environments. For 2026, we are migrating from simple waypoint missions to dynamic Urban Canyon Pathfinding to navigate high-rise obstacles safely.
2026 Objective
- • Urban Canyon: 3D obstacle avoidance algorithms for city blocks.
- • GPS-Denied Nav: Internal state estimation for the "Metal Shed" Faraday cage task.
Algorithms
Integration & Sensing
The "Eyes" of the system. This subsection handles raw data processing from onboard sensors (Cameras, LIDAR, IR). Crucial for Task 2, where we must identify pH-sensitive fire targets by color inside a dark structure.
Vision Stack
- • Target ID: OpenCV/YOLO pipelines for spotting drop zones and fire colors.
- • Spectral Analysis: Processing 940nm IR data for hotspot confirmation (2025 Legacy).
Sensor Fusion
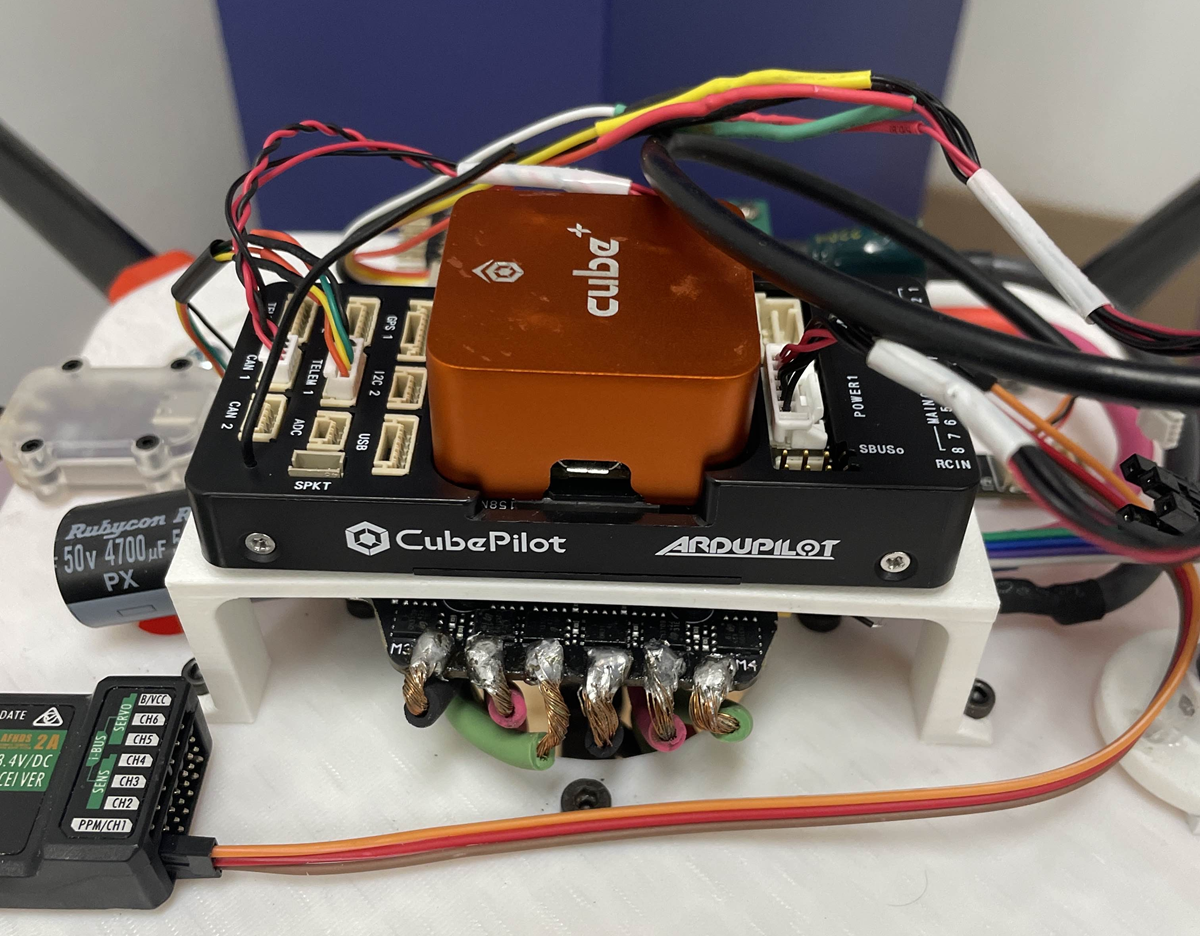
Actuation & Controls
The "Muscle" layer. We interface directly with the flight controller using Lua scripts to manage payload deployment and flight behavior. This ensures precision drops and pump activation happen exactly when the Integration layer detects a target.
Mechanisms
- • Payload: Servo-driven drop racks for Task 1 (Radio/Oxygen/Ladder).
- • Suppression: Pump modulation for pH-sensitive water delivery.
Execution Stack
Partner With Us
Sponsoring Valiant Aerotech is an investment in the future of aerospace innovation. Help us build the next generation of wildfire response systems.
- ✓ Website Placement
- ✓ Social Media Shoutout
- ✓ Small Logo on Drone
- ✓ Certificate of Thanks
- ✓ All Bronze Benefits
- ✓ 2 Dedicated Posts
- ✓ Medium Logo on Drone
- ✓ All Silver Benefits
- ✓ Event Program Profile
- ✓ 30s Video Segment
- ✓ Large Logo on Drone
- ✓ Title Sponsor Rights
- ✓ Custom Drone Model
- ✓ Full-Page Report Feature
- ✓ Multiple Large Logos
Team Structure
- Mohammad AwadPresident
- Abdullah ElbakryVice President
- Waleed Mannan Khan SherwaniSoftware Lead
- Taimur MirzaElectrical Lead
- YousefMechanical Lead
- Rohan Torul
- Garianna Knowles
- Anderson Bath